Acceleration Driver Behavior
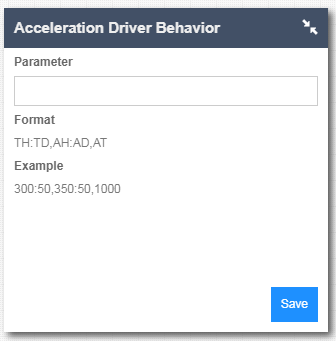
Here, you can set the sensor’s driving behavior parameters for Topflytech’s objects.
- This command is harsh behavior and accident monitoring via acceleration;
- Turn and brake threshold: threshold for mothion sensor to measure whether the device is in harsh turn or harsh brake status,this is acceleration, the range from 0 to 32767, the unit is 0.001g, for car our suggestion is 350, for bus and truck our suggestion is 300, 0 means disable it;
- Turn and brake duration: the time parameter to confirm that the device enters harsh turn or harsh brake staus,the time is (turn and brake duration) *8ms. I.e.The driver behaviors must maintain for a period of time larter than it defined by Turn and brake duration so that harsh turn or harsh brake behaviors event can be triggered, the range from 0 to 32767, our suggestion is 50; (it means 50*8=400ms)
- Accelerate threshold: the threshold for the motion sensor to measure whether the device is in harsh accelerate behavior status,this is acceleration, the range from 0 to 32767, the unit is 0.001g, for car our suggestion is 450, for bus and truck our suggestion is 350, 0 means disable it;
- Accelerate duration: the time parameter to confirm that the device enters harsh accelerate behavior status, the time is (accelerate duration)*8ms. I.e.The driver behaviors must maintain for a period of time larter than it defined by Accelerate duration so that harsh accelerate behaviors s event can be triggered, the range from 0 to 32767, our suggestion is 50;(it means 50*8=400ms)
- Accident shreshold: the range from 0 to 32767, the unit is 0.001g, for car our suggestion is 1200, for truck our suggestion is 1000, 0 means disable it;
Notes:for car we suggest to set BADB,0000,350:50,450:50,1000#, for bus and truck we suggest to set BADB,0000,300:50,350:50,1000#, BADB base on the car’s performance, so if you want to get exact driver behaivor and accident alert you need adjust for every car, it will be much better.
This command must work with INSTALLED command.